Difference between revisions of "S20: Nimble"
(→Team Members & Responsibilities) |
(→Printed Circuit Board) |
||
| Line 342: | Line 342: | ||
== Printed Circuit Board == | == Printed Circuit Board == | ||
| − | + | ||
| − | + | The PCB made for the Project Nimble RC car was initially designed in EAGLE, however, due to the board size limitations, the PCB had to be designed using DipTrace instead. | |
| + | |||
| + | == | ||
| + | |||
| + | [[File: Project Nimble PCB RevA.jpg]] | ||
| + | |||
<HR> | <HR> | ||
<BR/> | <BR/> | ||
| + | |||
== CAN Communication == | == CAN Communication == | ||
<Talk about your message IDs or communication strategy, such as periodic transmission, MIA management etc.> | <Talk about your message IDs or communication strategy, such as periodic transmission, MIA management etc.> | ||
Revision as of 05:20, 20 May 2020
Contents
Nimble
<Pic of the car>
Abstract
In this project, an autonomous vehicle framework for an RC car is presented using dedicated ECUs for motor control, on-board LCD display, steering control, sensor information handling, and communication bridging. A mobile application was also developed that allows for a user to set a destination, and receive updates on the RC car's position via a Bluetooth connection to the GPS unit. CAN communication between sensors and ECUs was defined via a DBC file. Code was developed using test-driven design principles in order to lower time spent debugging. Unit testing was performed using the CMock framework.
Introduction
The project was divided into these modules:
- Sensor node
- Motor node
- Driver node
- GPS node
- Bridge control node
- LCD node
- Mobile application
The objective was to create an autonomous vehicle that could navigate to a given GPS coordinate sent via a mobile application. The vehicle moves towards the target position Using a pre-compiled list of checkpoints, and handles obstacles along the way via its ultrasonic and infrared sensors. Updates on Nimble's position are sent to the mobile application via bluetooth.
Team Members & Responsibilities
<Team Picture>
- Yuming Cheng [ LinkedIn] Gitlab
- GPS Module
- Master Module
- Motor Module
- LCD display
- Wiki
- Naeem Mannan [ LinkedIn] Gitlab
- Wiki
- Mobile Application
- Francesco Vescio [ LinkedIn] Gitlab
- Wiki
- Lawrence Wan LinkedIn Gitlab
- Master Module
- GPS Module
- Motor Controller
- LCD display
- Sensor Module
- Wiki
Team Deliverables Schedule
| WEEK |
START DATE |
END DATE |
TASK DETAILS |
STATUS |
|---|---|---|---|---|
| 1 | Feb 2020 | 4 March 2020 |
|
|
| 2 | 05 March 2020 | 12 March 2020 |
|
|
| 3 | 13 March 2020 | 19 March 2020 |
|
|
| 4 | 20 March 2020 | 26 March 2020 |
|
|
| 5 | 27 March 2019 | 09 April 2019 |
|
|
| 6 | 10 April 2020 | 16 April 2020 |
|
|
| 7 | 17 April 2020 | 23 April 2020 |
|
|
| 8 | 24 April 2020 | 30 April 2020 |
|
|
| 9 | 1 May 2020 | 7 May 2020 |
|
|
| 10 | 8 May 2020 | 21 May 2020 |
|
|
| 11 | 22 May 2020 |
|
|
Parts List & Cost
| Item# | Part Desciption | Vendor | Qty | Cost |
|---|---|---|---|---|
| 1 | RC Car | Traxxas - Amazon [1] | 1 | $168.84 |
| 2 | CAN Transceivers MCP2551-I/P | Robotshop [2] | 6 | $ 6.00 per unit including shipping fee |
| 3 | GPS | Amazon [] | 1 | $ .00 per unit including shipping fee |
| 4 | Compass | Amazon [] | 1 | $ .00 per unit including shipping fee |
| 5 | Ultrasonic sensors(LV-MaxSonar-EZ0) | SparkFun [3] | 1 | $ 29.95 |
| 6 | Ultrasonic sensors (LV-MaxSonar-EZ1) | SparkFun [4] | 2 | $ 51.90 |
| 7 | IR sensors (GP2Y0A21YK) | SparkFun [5] | 1 | $ 34.23 including shipping fee and tax |
Printed Circuit Board
The PCB made for the Project Nimble RC car was initially designed in EAGLE, however, due to the board size limitations, the PCB had to be designed using DipTrace instead.
==

CAN Communication
<Talk about your message IDs or communication strategy, such as periodic transmission, MIA management etc.>
Hardware Design
<Show your CAN bus hardware design>
DBC File
<Gitlab link to your DBC file> <You can optionally use an inline image>
Shown below is the DBC implementation for this project.
VERSION ""
NS_ :
BA_
BA_DEF_
BA_DEF_DEF_
BA_DEF_DEF_REL_
BA_DEF_REL_
BA_DEF_SGTYPE_
BA_REL_
BA_SGTYPE_
BO_TX_BU_
BU_BO_REL_
BU_EV_REL_
BU_SG_REL_
CAT_
CAT_DEF_
CM_
ENVVAR_DATA_
EV_DATA_
FILTER
NS_DESC_
SGTYPE_
SGTYPE_VAL_
SG_MUL_VAL_
SIGTYPE_VALTYPE_
SIG_GROUP_
SIG_TYPE_REF_
SIG_VALTYPE_
VAL_
VAL_TABLE_
BS_:
BU_: DBG DRIVER IO MOTOR SENSOR BRIDGE GPS COMPASS CMP
BO_ 150 MOTOR_CMD: 3 DRIVER
SG_ MOTOR_CMD_STEERING : 0|8@1+ (1,-2) [-2|2] "" MOTOR
SG_ MOTOR_CMD_SPEED : 8|8@1+ (1,-25) [-25|25] "" MOTOR
BO_ 200 SENSOR_DATA: 8 SENSOR
SG_ SENSOR_SONARS_left : 0|16@1+ (1,0) [0|0] "cms" DRIVER
SG_ SENSOR_SONARS_mid : 16|16@1+ (1,0) [0|0] "cms" DRIVER
SG_ SENSOR_SONARS_right : 32|16@1+ (1,0) [0|0] "cms" DRIVER
SG_ SENSOR_IR_rear : 48|16@1+ (1,0) [0|0] "cms" DRIVER
BO_ 300 GPS_DESTINATION_INFO: 8 BRIDGE
SG_ GPS_DESTINATION_LAT : 0|28@1+ (0.000001,-90.000000) [-90|90] "degrees" DRIVER,GPS,MOTOR
SG_ GPS_DESTINATION_LONG : 28|29@1+ (0.000001,-180.000000) [-180|180] "degrees" DRIVER,GPS,MOTOR
BO_ 301 GPS_CURRENT_INFO: 8 GPS
SG_ GPS_CURRENT_LAT : 0|28@1+ (0.000001,-90.000000) [-90|90] "degrees" DRIVER,BRIDGE,MOTOR
SG_ GPS_CURRENT_LONG : 28|29@1+ (0.000001,-180.000000) [-180|180] "degrees" DRIVER,BRIDGE,MOTOR
BO_ 302 COMPASS: 6 GPS
SG_ CMP_DEST_BEARING : 0|16@1+ (0.1,0) [0|359.9] "degrees" DRIVER,BRIDGE,MOTOR
SG_ CMP_CURRENT_HEADING : 16|16@1+ (0.1,0) [0|359.9] "degrees" DRIVER,BRIDGE,MOTOR
SG_ CMP_DISTANCE : 32|16@1+ (0.01,0) [0|0] "meters" DRIVER,BRIDGE
BO_ 100 DRIVER_HEARTBEAT: 1 DRIVER
SG_ DRIVER_HEARTBEAT_cmd : 0|8@1+ (1,0) [0|0] "" SENSOR,MOTOR,GPS,BRIDGE
BO_ 101 SENSOR_HEARTBEAT: 1 SENSOR
SG_ SENSOR_heartbeat : 0|1@1+ (1,0) [0|1] "" DRIVER
BO_ 102 MOTOR_HEARTBEAT: 1 MOTOR
SG_ MOTOR_SENSOR_heartbeat : 0|1@1+ (1,0) [0|1] "" DRIVER
BO_ 103 GPS_HEARTBEAT: 1 GPS
SG_ GPS_SENSOR_heartbeat : 0|1@1+ (1,0) [0|1] "" DRIVER
BO_ 104 BRIDGE_HEARTBEAT: 1 BRIDGE
SG_ BRIDGE_SENSOR_heartbeat : 0|1@1+ (1,0) [0|1] "" DRIVER
BO_ 105 SENSOR_DEBUG: 1 SENSOR
SG_ IO_DEBUG_CAN_init : 0|1@1+ (1,0) [0|0] "" DBG
SG_ IO_DEBUG_sensor_init : 1|1@1+ (1,0) [0|0] "" DBG
SG_ IO_DEBUG_sensor_data : 2|1@1+ (1,0) [0|0] "" DBG
SG_ IO_DEBUG_bus_off : 3|1@1+ (1,0) [0|0] "" DBG
BO_ 106 MOTOR_DEBUG: 3 MOTOR
SG_ IO_DEBUG_CAN_init : 0|1@1+ (1,0) [0|0] "" DBG
SG_ IO_DEBUG_bus_off : 1|1@1+ (1,0) [0|0] "" DBG
SG_ IO_DEBUG_RPM_kph : 2|8@1+ (0.1,-25.6) [-25.6|25.5] "" DBG
SG_ IO_DEBUG_Steering : 10|8@1+ (1,-2) [-2|2] "" DBG
BO_ 107 DRIVER_DEBUG: 1 DRIVER
SG_ IO_DEBUG_CAN_init : 0|1@1+ (1,0) [0|0] "" DBG
SG_ IO_DEBUG_bus_off : 1|1@1+ (1,0) [0|0] "" DBG
SG_ IO_DEBUG_DRIVER : 3|1@1+ (1,0) [0|0] "" DBG
BO_ 108 GPS_DEBUG: 1 GPS
SG_ IO_DEBUG_CAN_init : 0|1@1+ (1,0) [0|0] "" DBG
SG_ IO_DEBUG_bus_off : 2|1@1+ (1,0) [0|0] "" DBG
SG_ IO_DEBUG_GPS : 3|1@1+ (1,0) [0|0] "" DBG
SG_ IO_DEBUG_Compass : 5|1@1+ (1,0) [0|0] "" DBG
BO_ 109 BRIDGE_DEBUG: 1 BRIDGE
SG_ IO_DEBUG_CAN_init : 0|1@1+ (1,0) [0|0] "" DBG
SG_ IO_DEBUG_bus_off : 2|1@1+ (1,0) [0|0] "" DBG
SG_ IO_DEBUG_Bridge : 4|1@1+ (1,0) [0|0] "" DBG
CM_ BU_ DRIVER "The driver controller driving the car";
CM_ BU_ MOTOR "The motor controller of the car";
CM_ BU_ SENSOR "The sensor controller of the car";
CM_ BU_ BRIDGE "The bridge controller of the car";
CM_ BU_ GPS "The GPS controller of the car";
CM_ BO_ 100 "Sync message used to synchronize the controllers";
CM_ SG_ 100 DRIVER_HEARTBEAT_cmd "Heartbeat command from the driver";
BA_DEF_ "BusType" STRING ;
BA_DEF_ BO_ "GenMsgCycleTime" INT 0 0;
BA_DEF_ SG_ "FieldType" STRING ;
BA_DEF_DEF_ "BusType" "CAN";
BA_DEF_DEF_ "FieldType" "";
BA_DEF_DEF_ "GenMsgCycleTime" 0;
BA_ "GenMsgCycleTime" BO_ 100 1000;
BA_ "GenMsgCycleTime" BO_ 200 50;
BA_ "FieldType" SG_ 100 DRIVER_HEARTBEAT_cmd "DRIVER_HEARTBEAT_cmd";
VAL_ 100 DRIVER_HEARTBEAT_cmd 2 "DRIVER_HEARTBEAT_cmd_REBOOT" 1 "DRIVER_HEARTBEAT_cmd_SYNC" 0 "DRIVER_HEARTBEAT_cmd_NOOP" ;
Sensor ECU
<Picture and link to Gitlab>
The sensor and bridge controller consists of sensor module that is responsible for object detection. Nimble uses ultrasonic sensors to achieve this task. As the name suggests, an ultrasonic sensor emits ultrasonic signal or beam from its head, and on encountering an object, returns back. This technique is better known as echolocation as we used sound signals to do so. The distance of the object is calculated based on the output and this ensures object detection. The distance measured is continuously passed on to driver node through can transceiver. The driver controller further processes the distance values of all the sensors on nimble and acts in accordance with the values to achieve obstacle avoidance.
Hardware Design
We have embedded 4 sensors on Nimble. We have arranged 3 LV-MaxSonar-EZ series Maxbotix ultrasonic sensors in the front section of the car; one at right, one at left and one in the center. The fourth Ultrasonic sensor is placed at the rear end of the car. These sensors provide very short to long-range detection. It provides sonar range information from 6-inches out to 254-inches with 1-inch resolution.


A maxbotix sensor gives out 3 types of output- analog, RS232, and Pulse width. We have used analog output and hence, utilized on-board analog to digital converters- ADC2 (P0.25), ADC3 (P0.26), ADC4 (P1.30), and ADC5 (P1.31). To trigger all the four ultrasonic sensors, we used P0.6, P0.7, P0.8 and P0.9 of SJTWO board. The analog output is converted to digital and transmitted to the driver controller. The converted adc distance data is passed to driver by Can transceiver. P0.0 is used as CAN RX and P0.1 as CAN TX on the Sensor module.
Hardware Interface
Sensors are interfaced with combination of GPIO, ADC Pins on SJTWo board. Below is the descriptive pin layout:
| Sr. No. | SJTwo board Pin | Maxbotix sensor Pin | Function |
|---|---|---|---|
| 1 | ADC2-P0.25 | AN(Left) | ADC input from left sensor |
| 2 | ADC3-P0.26 | AN(Rear) | ADC input from rear sensor |
| 3 | ADC4-P1.30 | AN(Right) | ADC input from right sensor |
| 4 | ADC5-P1.31 | AN(Middle) | ADC input from middle sensor |
| 5 | P0.6 | RX(Right) | Trigger for right sensor |
| 6 | P0.7 | RX(Left) | Trigger for left sensor |
| 7 | P0.8 | RX(Middle) | Trigger for middle sensor |
| 8 | P0.9 | RX(Rear) | Trigger for rear sensor |
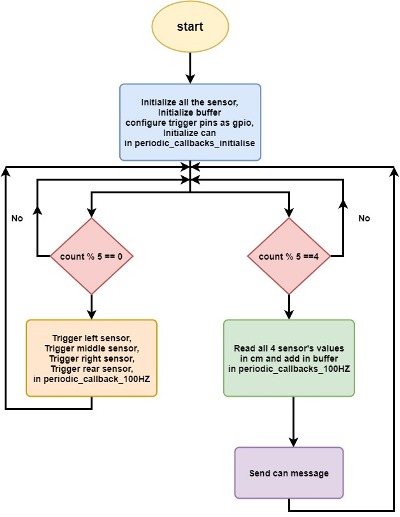
Software Design
<List the code modules that are being called periodically.>

Technical Challenges
< List of problems and their detailed resolutions>
Motor ECU
<Picture and link to Gitlab>
Hardware Design
Software Design
<List the code modules that are being called periodically.>
Technical Challenges
< List of problems and their detailed resolutions>
Geographical Controller
<Picture and link to Gitlab>
Hardware Design
Software Design
<List the code modules that are being called periodically.>
Technical Challenges
< List of problems and their detailed resolutions>
Communication Bridge Controller & LCD
<Picture and link to Gitlab>
Hardware Design
Software Design
<List the code modules that are being called periodically.>
Technical Challenges
< List of problems and their detailed resolutions>
Master Module
<Picture and link to Gitlab>
Hardware Design
Software Design
<List the code modules that are being called periodically.>
Technical Challenges
< List of problems and their detailed resolutions>
Mobile Application
<Picture and link to Gitlab>
Hardware Design
Software Design
<List the code modules that are being called periodically.>
Technical Challenges
< List of problems and their detailed resolutions>
Conclusion
<Organized summary of the project>
<What did you learn?> Nimble was a great opportunity to learn test-driven design strategies, which helped lower the amount of time troubleshooting issues. It also taught us much about using Git for version control. The project also gave us experience working with embedded systems technologies such as CAN bus communications, DBC files, GPIO, and signal debugging with BusMaster.
Project Video
Project Source Code
Gitlab Project Link - [6]
Advise for Future Students
<Bullet points and discussion>