Difference between revisions of "F16: Spartan and Furious"
Proj user10 (talk | contribs) (→Design & Implementation) |
Proj user10 (talk | contribs) (→CAN BUS Design) |
||
| Line 336: | Line 336: | ||
== CAN BUS Design == | == CAN BUS Design == | ||
| − | |||
<br clear= all> | <br clear= all> | ||
==== CAN 11-bit ID Format ==== | ==== CAN 11-bit ID Format ==== | ||
Revision as of 04:28, 19 December 2016
Contents
- 1 Project Title
- 2 Abstract
- 3 Objectives & Introduction
- 4 Team Members & Responsibilities
- 5 Schedule
- 6 Parts List & Cost
- 7 Car Framework and Components
- 8 CAN BUS Design
- 9 ECUs
- 10 Motor Controller
- 11 Android and Communication Bridge
- 12 Geographical Controller
- 13 Sensor and I/O
- 14 Master Controller
- 15 Conclusion
- 16 References
Project Title
Android Application controlled Self-Driving Car using CAN bus.
Abstract
Embedded systems are unique, they tend to take real world inputs, such as light, and make meaningful applications of this data. A self driving car is the epitome of an embedded system, they take all kinds of information through various sensors and try to give results in the form of travelling from point A to point B. In this project, we attempt to create a self driving car with the aim of putting into practice the knowledge gained through the CMPE 243 course.
Objectives & Introduction
In this project, we aim to use the CAN bus to create a self-driving car that can travel between two pre-determined points. The path for the car is given through a mobile application based on the android operating system. The car then navigates between these points by taking location feedback through a GPS system and using ultrasonic sensors embedded on the car to avoid obstacles in the path of the car. IO systems present on the car give us pertinent information about the status of the car and the onboard processing.
The Objectives for this project are:
• The car must be able to interact with a Bluetooth enable mobile application and provide a path that the car must follow.
• Given the path to follow, the car must use a GPS module to gather location feedback and route the car toward its destination.
• The car must be able to determine obstacles in its path using ultrasonic sensors and avoid.
• The car must be able to control its speed in various terrain using a speed feedback mechanism.
• Provide meaningful information about the car’s present status using IO modules such as LEDs and LCD.
• A master board must be able to determine the correct action required for the data gathered through sensors and GPS feedback.
• All the modules must communicate with each other over the CAN bus.
• Document the findings in this report for future classes to reference so that they may improve this design.
Team Members & Responsibilities
- Android and Communication Bridge:

- Geographical Controller:
- Master Controller:
- Motor Controller
- Sensor and I/O Controller:

Schedule
Legend:
Motor Controller , Master Controller , Android Controller, Geo Controller, Sensor and I/O Controller , Team Goal
| Week# | Date | Task | Actual | Status |
|---|---|---|---|---|
| 1 | 9/17/2016 |
|
|
Complete. |
| 2 | 9/24/2016 |
|
|
Complete |
| 3 | 10/01/2016 |
|
|
Complete |
| 4 | 10/08/2016 |
|
|
Complete |
| 5 | 10/15/2016 |
|
|
Complete |
| 6 | 10/22/2016 |
|
|
Complete. |
| 7 | 10/29/2016 |
|
|
Complete. |
| 8 | 11/05/2016 |
|
Integration and Testing completed for the first demo. | Complete. |
| 9 | 11/12/2016 |
|
|
Complete. |
| 10 | 11/19/2016 |
|
|
Complete |
| 11 | 11/26/2016 |
|
|
Complete |
| 12 | 12/03/2016 |
|
|
Complete |
| 13 | 12/10/2016 |
|
In Progress |
Parts List & Cost
| Item# | Part Description | Vendor | Qty | Cost |
|---|---|---|---|---|
| 1 | SJ One Board (LPC 1758) | From Preet | 6 | $480 |
| 2 | RC Car | Sheldon Hobbyist | 1 | $309.99 |
| 3 | Accelerometer/Magnetometer LSM303 | Adafruit | 2 | $40.00 |
| 4 | Bluetooth Module | From Preet | 2 | $0 |
| 5 | CAN Transceivers | From Microchip. | 10 | $0 (Free Samples) |
| 6 | Battery Pack | From Sheldon Hobbist | 1 | $49.99 |
| 7 | Ultra Sonic Sensor | From Maxbotix | 5 | $91.15 (at 40% student discount) |
| 8 | LCD Display | From Digikey | 1 | $94.21 |
| 9 | GPS Module | From Adafruit | 1 | $43.34 |
| 10 | General Components | From HSC electronics | - | $83.17 |
| 11 | DC Current Sensor | From Adafruit | 1 | $14.39 |
| 12 | PCB | From Amazon | 1 | $10.66 |
| 13 | Corrugated Sheet for chasis | From Home Depot | 1 | $6.74 |
| 14 | PCAN dongle | From Preet | 1 | $0 |
Car Framework and Components
Stampede 4X4 is built on the advanced shaft-driven 4WD system and innovative modular design of the Slash 4X4. The chassis fully integrates the electronics and battery compartment for an efficient and compact layout, and maintains the high center ground clearance. It uses just three gear meshes to drive all four wheels, eliminating the need for a multi-gear transmission. The highly efficient drive train spins effortlessly on rubber-sealed ball bearings, and is integrated seamlessly into the unique chassis for optimum performance and easy maintenance. A single center driveshaft connects the front and rear drive assemblies for maximum power transfer. To harness the torque of the Titan 12-turn motor, Traxxas bolted in the high-performance, waterproof XL-5 electronic speed control. EZ-Set one-button setup makes it easy to adjust or change profiles.


CAN BUS Design
CAN 11-bit ID Format
| SRC | DST | MSG |
|---|---|---|
| 3 bits (10-8) | 4 bits (7-4) | 4 bits (3-0) |
Controller ID Table
| Controller ID | Controller Type |
|---|---|
| 0 | System Command |
| 1 | Master Controller |
| 2 | Sensor Controller |
| 3 | BLE Controller |
| 4 | Geo Controller |
| 5 | Motor Controller |
| 5 | I/O Controller |
CAN Communication Table
| Sr. No | Message ID | Message function | To |
|---|---|---|---|
| System Commands | |||
| 1 | 10 | System communication command | Master |
| Master Controller Commands | |||
| 2 | 100 | Master System Command for the all modules to start or stop processing | BLE, Geo, I/O, Motor, Sensor |
| 3 | 151 | Steer and Drive command for the Motor module | Motor, I/O |
| 4 | 162 | Display the active state of each module | BLE, I/O |
| Sensor Controller Commands | |||
| 5 | 211 | Obstacle Data | Master, I/O |
| 6 | 214 | Heartbeat | Master |
| 7 | 263 | Battery Health | I/O |
| BLE Controller Commands | |||
| 8 | 314 | Heartbeat | Master |
| 9 | 341 | Checkpoints | Geo |
| Geo Controller Commands | |||
| 10 | 411 | Calculated Direction for the car | Master |
| 11 | 413 | Destination Reached flag | Master, BLE, I/O |
| 12 | 414 | Heartbeat | Master |
| 13 | 431 | Start point | BLE, I/O |
| 14 | 461 | Compass data | I/O |
| Motor Controller Commands | |||
| 15 | 514 | Heartbeat | Master |
| 16 | 561 | Car speed | I/O |
| I/O Controller Commands | |||
| 17 | 614 | Heartbeat | Master |
DBC File
Can Bus analyzer
The PCAN-USB adapter enables simple connection to CAN networks. Bus Master software has been used to read and debug CAN messages.

ECUs
Motor Controller
Group Members
Design & Implementation
The motor controller is responsible for generating the driving and steering action of the car. For this purpose, we have two types motors viz DC motor for driving and Servo motor which is used for changing directions of the car. The motor controller is also interfaced with a speed encoder for generating a feedback mechanism to automatically control and monitor the speed of the car. Our car came equipped with a Servo motor and brushed DC motor which is connected Electronic Speed Control (ESC).
Hardware Design

- Hardware Specifications
- 1. DC Motor

Our car came with Titan 12T 550 brushed motor and waterproof ESC. The ESC drives the DC motor based on the Pulse Width modulation (PWM) applied to it. The power supply required for this motor is 8.4 V. Maximum speed of upto 30mph can be achieved. The rotational speed is proportional to the EMF generated in its coil and the torque is proportional to the current.The main connection pins driving the motor are VCC,GND and the Control pin (PWM). The pin P2.1 of SJ-one board is connected to supply the required PWM to the motor. The basic working principle of DC motor is illustrated in the following figure : Since the preprogrammed controller has to be replaced by using our design ,the DC motor is then tested with Digital Oscilloscope for getting the frequency of operation and equivalent PWM values for full throttle condition in the forward as well as backward condition. It was observed from the waveform that the frequency of operation is 100Hz. The range of operational duty cycle is 10% to 20% with 15% being the neutral value or the stop condition. In order to accelerate the car a PWM value in the range of 15.6%-20.0% is applied. The 15.6 is the minimum pickup PWM that should be supplied in order to get the car moving at full load.
- 2. Servo Motor

The servomotor used in the car is #2056 a waterproof all weather-action and double the steering power as compared to standard servos. The servo motor is responsible for controlling the steering action of right or left by applying a suitable PWM pulse. The servo motor can be driven with 3.3 V power supply. The pin P2.0 of SJ-one board is connected to supply the required PWM to the motor. After testing the servo motor, we found that the frequency of operation is 100Hz and the operational duty cycle range is 10.0%-20.0% with 15% being the neutral value. For a full right deflection, we provide input PWM pulse ranging from 15.0-20.0% and for full deflection to the left we apply 10.0-15.0% of PWM.

- 3. Speed Sensor
The speed feedback is monitored through the speed encoder which works on the Hall-effect principle. The Hall-effect speed sensor works as a transducer whose output voltage varies in response to the magnetic field. The sensor is mounted on the Spur gear instead of the wheel. The sensor would detect the rotation of axle. The motor controller would detect whenever the magnet is aligned with the sensor. This would generate a pulse. The pulse is detected in the form of rising-edge interrupt. This gives the wheel rotation count. The wheel rotates for every 1/4th rotation of the spur gear. The rotation count can then be converted to rpm to calculate the speed of the car.


Hardware Interface
The CAN bus is used to send and receive messages to and from the Master Controller. The motor controller receives driving and steering signals from the master. The speed calculation is performed using the speed sensor and is sent on the bus, which will be received by the IO controller for display purposes.
Software Design
The following diagram describes the flow of the software implementation.

Implementation
The motor controller receives all its signals from Master controller from the CAN bus. The motor controller receives the steer and drive command from the master. The motor controller receives the System start command which boots and decodes further drive signals to the motor controller. Upon receiving the drive command the motor controller decodes the steering action. Upon receiving suitable data about the obstacle from sensor controller the master controller relays appropriate steering action. To achieve better performance in steering, the turn is categorized as FULL and HALF. This gives better precision in turning.
- Speed Regulation:
Upon detection of uphill the pulse received from the speed encoder reduces. This is detected and the motor feedback is designed such that the speed is increased by providing higher value of PWM value to drive the DC motor. Similarly, for downhill the pulse count received increases which is detected by the speed encoder and the speed is reduced by applying reduced PWM.
Testing & Technical Challenges
- Wheel Alignment Error
Though the neutral value of PWM is 15% at which the servo is supposed to be aligned straight. In practice, however when we tested the car for straight run slight deflection towards right was observed when the PWM pulse width was set to 15.0 %. Thus, to correct this, we provided correction value of -0.98 giving a resultant PWM pulse width of 14.02%. Thus, we fixed the wheel alignment and obtained the desired straight path traversal.
Android and Communication Bridge
Group Members
Design & Implementation
The design section can go over your hardware and software design. Organize this section using sub-sections that go over your design and implementation.
Hardware Design
Discuss your hardware design here. Show detailed schematics, and the interface here.
Hardware Interface
In this section, you can describe how your hardware communicates, such as which BUSes used. You can discuss your driver implementation here, such that the Software Design section is isolated to talk about high level workings rather than inner working of your project.
Software Design
Show your software design. For example, if you are designing an MP3 Player, show the tasks that you are using, and what they are doing at a high level. Do not show the details of the code. For example, do not show exact code, but you may show psuedocode and fragments of code. Keep in mind that you are showing DESIGN of your software, not the inner workings of it.
Implementation
This section includes implementation, but again, not the details, just the high level. For example, you can list the steps it takes to communicate over a sensor, or the steps needed to write a page of memory onto SPI Flash. You can include sub-sections for each of your component implementation.
Testing & Technical Challenges
Describe the challenges of your project. What advise would you give yourself or someone else if your project can be started from scratch again? Make a smooth transition to testing section and described what it took to test your project.
Geographical Controller
Group Members
Design & Implementation
Geographical Controller is responsible for commanding the Motor Controller on which direction the vehicle has to move. It consists of a Global Positional System (GPS) module to track the current location of the vehicle and a Compass (Magnetometer) to command the direction of steer to the motor with respect to its current direction and Bearing Angle of the GPS.

We have developed the algorithm based on the following parameters:
1. Bearing Angle
2. Heading Angle
1. Bearing Angle: Bearing Angle is the Angle between two points with respect to the Geographical North. We can calculate this from the GPS module by using Haversine formula. Further details are discussed in the Implementation section.

As we can see in the picture, If we consider point A is the current location and point B as the destination, 𝚹 represents the Bearing angle between point A and point B with respect to its Geographical North.
2.Heading Angle: Heading Angle is the angle of the orientation of the vehicle(clockwise) with respect to the Geographical North. The output from the Compass (LSM303) will be from 0 to 360 degrees. However, due to the magnetic declination, the compass needs to be calibrated.

Hardware Design
(Discuss your hardware design here. Show detailed schematics, and the interface here.)
The below picture shows the hardware schematic of Geo-Controller.

LSM303DLHC:
LSM303 has both Compass (Magnetometer) and Accelerometer. We have used LSM303 to calculate the compass raw Heading angle. The LSM303 can be used as a compass by calculating the angle of magnetic field with respect to x-axis and y-axis. The communication between SJOne board and LSM303 is done using the I2C serial bus interface. The connections between LSM303 and SJOne board is showed in the following picture.

We used continuous conversion operation mode and the I2C interface supports fast mode which is 400KHz. However, we are using the standard mode which is 100 KHz.

GPS Module:
The GPS module is very critical to the project as it should be very accurate and fast enough to update the location when the vehicle is moving. So, we have used the Ultimate GPS module from Adafruit which updated at a rate of 10Hz that means the GPS updates the geolocation data every 100 milliseconds. The below picture shows the GPS module. The communication between GPS and SJOne board is done via UART.
The default baud rate of GPS module is 9600. However, we can increase the baud rate based on our requirement.

The pin connect of GPS to SJOne is showed in following picture.

After making proper connections, the GPS will take some time to get the Fix. If the red LED is blinking, we have to understand that the Fix is not available. Sometimes we will not get a fix or it will take more time to get the fix if the board is indoors. From our observations, using a coin battery reduce the fix time in case there is a flakey power connection.

The output of GPS module will be strings which consists of multiple data formats such as GPGGA, GPGLL, GPRMC, GPGSA etc. In our software, we have parsed the data only for GPGGA raw data as this string contains all the data required to locate the current location. GPGGA refers to Global Positioning System Fix Data. The following snapshot gives the complete description of the GPGGA message format.

Software Design

Flow of Geo Algorithm:
1. Receive System start command from master
2. Check for GPS Fix.
3. If Fix available, send current vehicle geographical coordinates(Latitude and Longitude) to Android via Bluetooth.
4. Android receives the current vehicle location, identifies vehicle destination point along with the checkpoints and sends the checkpoints to Geo Controller via CAN.
5. When fix is available and last checkpoint received from Android, Geo-Controller puts all the received checkpoints into a vector one after the other.
6. Geo-Controller checks whether the destination point is reached. If not, Geo-Controller takes one checkpoint at a time and calculates the compass heading, GPS bearing angle and distance from the starting point to first checkpoint (using Haversine formula).
7. After calculating the heading, bearing angles, Geo-Controller decides on which direction the vehicle should move by using the steering control algorithm and gives the direction command to master.
8. Master controls the motor to move in that direction. Once the vehicle reaches the first checkpoint, the same flow continues for the remaining checkpoints.
9. As soon as the last destination checkpoint is popped, we check for the checkpoint vector size. If the vector size is zero and when the vehicle reaches the destination point, we turn a destination reached flag and commands the master to stop the vehicle.
We can calculate the bearing angle and distance between the source and destination points using the below mentioned Haversine Formulae.
Haversine Formula:
a = sin²(Δφ /2) + (cos φ1 ⋅ cos φ2 ⋅ sin²(Δλ/2))
c = 2 x atan2( √a, √(1−a) )
Distance, d = R x c
Where,
Φ is latitude
λ is longitude
R is Earth’s radius i.e., 20,902,231 Feet/6371 Km
Δφ = latitude2 – latitude1
Δλ = longitude2 – longitude1
Implementation
1. Usage of Vectors: We used vectors to store and process the checkpoints from Android application. The main reason for using vectors is that the size will grow and shrink with every addition and deletion of checkpoints. So, we can simply check the number of checkpoints left from the vector. We also turned a flag when the vector is empty which means when the flag is on, we have reached the destination.
2. Steer Command: Direction command to master is given based on the different ranges mentioned in the below picture:

The offset value and the steer angular range is calibrated after rigorous testing. For example: If the compass heading at 60 degree angle from bearing angle (clockwise), we have checked which direction the vehicle is attaining the optimum smooth movement, Half Left or Left? Based on these factors, the calibration is done for steer range.
3. Dummy Coordinates: Sending dummy coordinates at the start point and at the end after the destination point. For example, we are sending (1,1) point initially to check for the first checkpoint. Similarly, we are sending (0,0) at the end after receiving the destination point. We implemented an algorithm to check these conditions and send corresponding commands to the master to inform that the vehicle has reached the destination.
Testing & Technical Challenges
Magnetometer Calibration:
Reason for calibration:
As mentioned in the below picture, the LSM303 compass range is not concentric with actual compass range. There will be a deflection due to this. For example; we have observed the deflection of LSM303 compass is very minimal with respect to ideal compass readings for a range of 90 – 180 degrees. However, the LSM303 deflection increases as the LSM303 compass angle deflection will slowly increases from 180 to 360 and 0 to 90 degrees.

Few observations are mentioned in table below. So, we used linear equations to calibrate by finding the slope and the addition factors. Since, the deflection is not linear, we have divided the range of 0-360 angle in three different ranges and applied the linear equations respectively.

Calibration Before Mounting on the Car:


However, after mounting the LSM303 compass on the vehicle, the LSM303 compass range from 130 – 220 degrees instead of 90 - 180. So, we have divided the angle into three different ranges i.e., 0 – 185, 185 – 340 and 340 – 360 and applied linear equations as showed below.
Y = a X + b;
Where,
Y is actual reading
X is raw magnetometer readings
a is multiplication factor
b is additional factor
Calibration After Mounting on the Car:


Sensor and I/O
Group Members
SENSOR
Design & Implementation
We are using Maxbotix LV-EZ Ultrasonic sensors (MB1000). The configuration of the sensor is 3:1 that is three sensors in the front separated by 60 degrees apart and one in the rear. The ultrasonic sensors mounted on the car are used to detect the obstacle on its route. These sensors are connected to the SJOne board and work with a 5.0V power supply. The SJ One board then sends the sensors message with the help of CAN bus.
The pin description of Maxbotix LV-EZ Ultrasonic sensors is as follows:
Pin 1-BW- Unused, leave disconnected or connect to circuit common ground.
Pin 2-PW- Digital Proximity Logic, outputs a High/Low logic voltage level depending on proximity detection. High means an object has been detected in the detection zone. Low means no object is present. There is a ~2.5 second delay on acquiring targets and a ~1.5 second delay for releasing a target once detected. This hysteresis improves sensor reliability.
Pin 3-AN- Unused, leave disconnected or connect to circuit common ground.
Pin 4-RX- This pin is internally pulled high. The LV-ProxSonar-EZ will continually measure proximity information and output send to data. Leave the pin disconnected or hold the pin high for proximity information. Hold low to stop all sensor activity and reset acquire timers. Upon returning to a high state, the sensor will initiate a calibration sequence.
Pin 5-TX- The TX output delivers asynchronous serial with an RS232 format, except voltages are 0-Vcc
Pin 6-+5V- Vcc – Operates on 2.5V - 5.5V. Recommended current capability of 3mA for 5V, and 2mA for 3V.
Pin 7-GND- Return for the DC power supply. GND (& Vcc) must be ripple and noise free for best operation.
Hardware Design
The ultrasonic sensor is interfaced through GPIO, each sensor requires 2 pins, PW and RX, in addition to the two pins required for powering up the sensor. The PW pins for each sensor is configured as an interrupt. The following table and figure shows the pin connections for all the sensors to the SJOne board.

| Sr.No | SJOne Pin Number | Sensor Pin Function |
|---|---|---|
| 1 | P1.23 | Middle Sensor PW |
| 2 | P 2.3 | Middle Sensor Rx |
| 3 | P 1.28 | Left Sensor PW |
| 4 | P 2.5 | Left Sensor Rx |
| 5 | P1.22 | Right Sensor PW |
| 6 | P 1.29 | Rear Sensor Pw |
| 7 | P 2.7 | Rear Sensor Rx |
The figure below shows the design for the 3D mount for the front sensors.
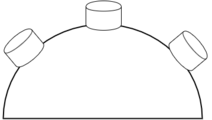
Ultrasonic mount Design

3D design


Ultrasonic Sensor
There are three ultrasonic sensors for the front of the car positioned at different angles to provide a wide ultrasonic "vision" for the car. The mount for the sensors was 3D printed such that we have the flexibility to change the angle of the sensor at a later stage when debugging the sensor.
Hardware Interface
In this section, you can describe how your hardware communicates, such as which BUSes used. You can discuss your driver implementation here, such that the Software Design section is isolated to talk about high level workings rather than inner working of your project.
Software Design
The readings from the sensor is taken in the form of PWM signals with the help of interrupts. The following steps were performed to take readings and calculating distance from the sensor
- Configure the PW pin of sensor as input.
- Configure RX pin of the sensor as output and set it high.
- Enable the Rising and the Falling edge interrupt on the PW pin of the sensor.
- Start timer at the rising edge of the interrupt (time T1).
- At falling Edge of the interrupt stop the timer (time T2).
- The distance of the obstacle is = (T2-T1)/147 inches.
- Check for threshold distance. If distance > threshold distance for given sensor, then convey to master that obstacle was found.
- If middle sensor value has distance <= critical distance then convey then set critical bit, conveying that car must stop to avoid a collision
- Broadcast data on CAN bus

Implementation
This section includes implementation, but again, not the details, just the high level. For example, you can list the steps it takes to communicate over a sensor, or the steps needed to write a page of memory onto SPI Flash. You can include sub-sections for each of your component implementation.
Testing & Technical Challenges
Describe the challenges of your project. What advise would you give yourself or someone else if your project can be started from scratch again? Make a smooth transition to testing section and described what it took to test your project.
I/O
Design & Implementation
The IO section for the car consists of two main components, an LCD screen and LED indicators.


IO is integral to troubleshooting the working of the car. The team first decided upon the various important indicators that would be needed to troubleshoot the working of the car and then decided to translate them into either LED indicators or LCD screen elements. The table below summarizes the features for IO and which IO element was used to represent them on the car.
| Sr.No | Sensor Pin Function | LCD Element | LED Element Present |
|---|---|---|---|
| 1 | System Command (Start, Stop Resume) | An on screen LED that turns off/on for each command | Yes |
| 2 | Right Turn | An on screen LED that turns off/on | Yes |
| 3 | Left Turn | An on screen LED that turns off/on | Yes |
| 4 | Brake | An on screen LED that turns off/on | Yes |
| 5 | Forward | An on screen LED that turns off/on | Yes |
| 6 | Reverse | An on screen LED that turns off/on | Yes |
| 7 | Right Sensor | Gauge | No |
| 8 | Left Sensor | Gauge | No |
| 9 | Middle Sensor | Gauge | No |
| 10 | Rear Sensor | An on screen LED that turns off/on | Yes |
| 11 | System Status (Heatbeat) | Gauge | No |
| 12 | Speed. | Meter. | No |
| 13 | Battery Indicator | Gauge | No |
Hardware Interface
The hardware interface for the LCD is through UART for LED it is through GPIO. LCD Hardware interface: The LCD controller works on UART communication. Uart-2 on SJONE board is used for sending the data and command to uLCD-32PTU.
We are using uLCD-32PTU to debug and display the important CAN message. We used this LCD because of following features:
- The uLCD-32PTU is a compact and cost effective Intelligent Display Module packed with plenty of features capable of being an interface controller for a number of applications.
- Built in extensive 4DGL graphics and system library functions.
- Simple UART communication at 9600 Baud rate is used to communicate with SJONE board.
LED hardware interface: For the LEDs we connected the the positive end to the VCC and the negative end to the GPIO. This was done to prevent the SJOne port from being the current source for a constantly glowing LED. There are 10 LEDs in total on the car. 4 in the front and 6 in the rear.




Software Design


Form 0
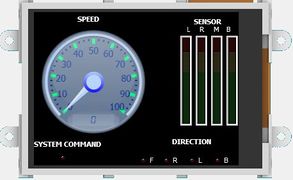
Form 1
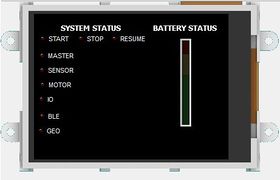
Form 2
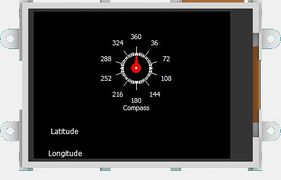
Form 3




- Form0: This is the home screen for Spartan and Furious which displays the logo of our team. This screen is displayed when there is no system command from the Master. As soon as the IO receives the master system command the IO displays all the relevant data using periodic callback function.
- Form1: This is the screen which is being displayed after the home screen. This screen shows the sensor data, Speed indication, System command status and the direction in which the car is moving.. There are four different gauges for different sensor Data. Each gauge indicates obstacle proximity detected from ultrasonic sensors which are placed on left (L), centre (M), right (R) and rear sensor at back (B) of the car. The direction of the car is indicated using different LEDs for Front(F), Right(R), Left(L), Back(B) indication. The system command LED indicates that master is in sync with all the modules.
- Form2: In this screen IO displays the System Status of all the modules and also the System status given by the master module to all the modules. System status consists of start, stop and Resume status. There are six different LED’s indication the Heartbeat of the modules. There is a battery indicator Gauge which displays the battery life.
- Form3: This is the ‘Geo Status’ screen which shows different parameters such as GPS longitude and latitude, current compass direction and different modes of car.
The data is sent to the LCD in specified format.
For sending Gauge, LED, Speedometer data we need to send five bytes of data.
Byte1 - Event byte
Byte2 - Object type
Byte3 - Object number
Byte4 - Data byte 1
Byte5 - Check sum
For angular meter readings we have six bytes of data to be sent.
Byte1 - Event byte
Byte2 - Object type
Byte3 - Object number
Byte4 - Data byte 1
Byte5 - Data byte 2
Byte6 - Check sum
For String to be passed we need to have 3 bytes + each character as data byte + checksum byte.
Byte1 - Event byte
Byte2 - Object type
Byte3 - Object number
Byte4 - Data byte 1
Byte5 - Data byte 2
Byte6 - Data byte 3
.
.
.
Byte n+3 - Data byte n
Byte n+4 - Check sum
The data is sent to the LCD using UART. Following steps should be performed in order to display the readings on LCD.
- Wait for system command from master.
- Once master command has been received, collect CAN data for all information that has to be shown on IO.
- Update the corresponding LCD element, and toggle the LEDs based on data received.
- Switch LCD form every 5 seconds.
- If destination reached, show the destination reached form.
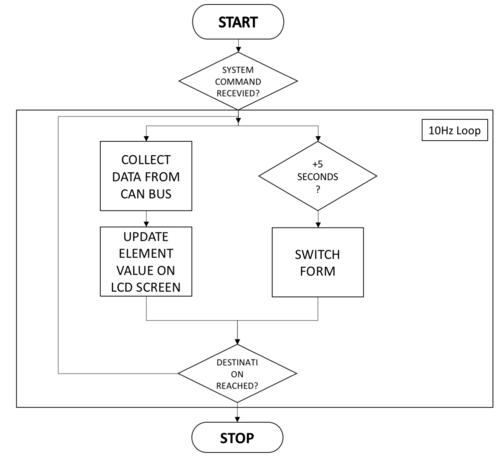
LCD code Flowchart
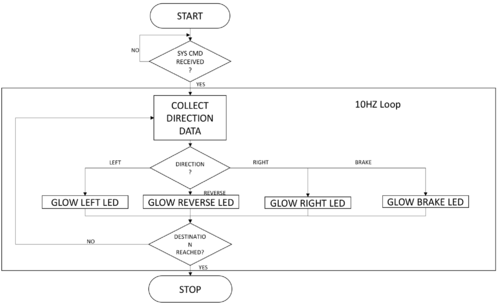
LED code Flowchart


Master Controller
Group Members
Introduction and Responsibilities
Master controller is like the brain of the car.
All the decisions are taken by the master module. Some of the major responsibilities of the master module are:
1. Obstacle avoidance : Based on the sensor values, master will decide the direction to be taken by the motor.
2. GPS data: Depending upon the GPS commuted direction sent by the geo module and obstacle data received from sensor module, master controlled will make a decision in regards to the steer and drive of the motor .
3. System command (Initial Start) : Upon successful connection with Android app, master command will send as system start command to all the other modules on the CAN bus. This command advises all the modules to start their processing(similar to wake up).
Hardware Design
- Interface of CAN Bus with six SJ-One controller boards on PCB was designed.
- Ribbon Cables were used instead of individual jumper wires to assist in designing less complex circuit.

Software Design
The software design of master controller is such that there are two modes for the car:
Free Run mode
• For switching to free run mode, the “FREE RUN” button needs to be selected from the app.
• After the free run mode is selected, master controller will send SYSTEM_CMD= START command to all of the modules, which notifies them that the Bluetooth communication via app has been initiated.
• As per the sensor data, the movement of the car is decided by the master controller.
• The following table depicts the motor command send by master to the motor controller as per the sensor values.
| Sr no | Left sensor value | Middle sensor value | Right sensor value | Critical value | Rear sensor value | Motor Command |
|---|---|---|---|---|---|---|
| 0 | 0 | 0 | 0 | 0 | X | STRAIGHT |
| 1 | 0 | 0 | 1 | 0 | X | HALF RIGHT |
| 2 | 0 | 1 | 0 | 0 | X | LEFT |
| 3 | 0 | 1 | 1 | 0 | X | RIGHT |
| 4 | 1 | 0 | 0 | 0 | X | HALF LEFT |
| 5 | 1 | 0 | 1 | 0 | X | STRAIGHT |
| 6 | 1 | 1 | 0 | 0 | X | LEFT |
| 7 | 1 | 1 | 1 | 0 | 0 | REVERSE |
| 8 | 1 | 1 | 1 | 0 | 1 | STOP |
| 9 | X | X | X | 1 | 0 | REVERSE |
| 10 | X | X | X | 1 | 1 | STOP |
• When STOP button is selected from the app,the BLE will advise the same to master controller and master will send SYSTEM_CMD= STOP to all the modules. This stop command notifies them that the Bluetooth communication via app has been deactivated.
GPS mode
Implementation
This section includes implementation, but again, not the details, just the high level. For example, you can list the steps it takes to communicate over a sensor, or the steps needed to write a page of memory onto SPI Flash. You can include sub-sections for each of your component implementation.
Testing & Technical Challenges
Describe the challenges of your project. What advise would you give yourself or someone else if your project can be started from scratch again? Make a smooth transition to testing section and described what it took to test your project.
Conclusion
Conclude your project here. You can recap your testing and problems. You should address the "so what" part here to indicate what you ultimately learnt from this project. How has this project increased your knowledge?
Project Video
Upload a video of your project and post the link here.
Project Source Code
References
Acknowledgement
We would like to thank Preet for explaining the various Embedded Software concepts. The understanding of these concepts helped us in successful implementation of this project. Also, this project has helped us put into practice whatever we learned in the class.
References Used